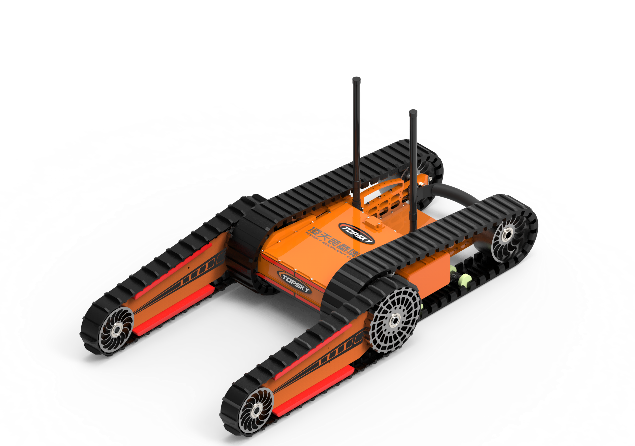
RXR-C10D Petit robot de reconeixement d'incendis


| Els robots de reconeixement d'incendis s'utilitzen principalment per substituir entorns inflamables, explosius, complexos i altres durs que s'aproximen artificialment per al reconeixement ambiental i la detecció de gasos.També es poden utilitzar per al reconeixement en espais petits i baixos, com ara la part inferior de la carrosseria i la part inferior de la prestatgeria.El xassís adopta una estructura d'oruga + doble braç oscil·lant frontal, que pot travessar obstacles verticals de 280 mm com a màxim i pot pujar a una plataforma de 360 mm, que es pot adaptar a diversos terrenys per a un desplegament ràpid de combat.La interfície d'expansió multifunció es pot equipar amb diferents mòduls de carrosseria.Al mateix temps, el robot està equipat amb un control per cable, que pot funcionar de manera remota mitjançant cable sota la condició d'interferència del senyal.Els braços oscil·lants dobles del robot es poden desmuntar lliurement, que es poden utilitzar en més escenaris. |
| 2.Característiques |
| 1. Control remot intel·ligent Botó d'expansió multifunció Funcionament visualitzat en pantalla gran 2. Modularització de tota la màquina Modularització del xassís, modularització de la bateria, modularització de la suspensió 3. Excel·lent rendiment en escalar, pujar escales, creuar obstacles i creuar trinxeres Pot pujar pendents de 45 graus Pot pujar escales de 40 graus Pot escalar obstacles verticals de 28 cm Pot abastar trinxeres de 41 cm d'ample 4.Sistema de vídeo Mode de comunicació de 3 punts, per resoldre operacions normals en un entorn no visual, distància de comunicació 1 km Càmera HD de 2 canals 5.Múltiples mòduls d'expansió Mòdul Lidar, mòdul de detecció de gasos, mòdul de cardan de reconeixement, mòdul de braç robòtic
Quatre ports d'endoll d'aviació ampliats, reservats RS232, RS485, CAN, port de xarxa, 24V, 12V (normalment tancat)
|
| 3.Tparàmetres tècnics3.1 Tot el robot: 1. Nom: petit robot de reconeixement d'incendis RXR-C10D (B) 2. Model: RXR-C10D 3. Funció bàsica: funció de reconeixement de vídeo 4. Nivell de protecció: el nivell de protecció de tot el robot és IP67 5. Potència: bateria elèctrica de liti ternària 6. Mida: ≤ longitud 610 mm × amplada 490 mm × alçada 200 mm (sense antena) 7. Diàmetre de gir: girant al seu lloc 8.Pes: ≤25kg 9. Velocitat lineal màxima: ≥2,7 m/s, velocitat continua de control remot 10. Quantitat de desviació directa: ≤5% 11.Capacitat d'escalada: ≥45° 12. Capacitat d'escalada: ≥40° 13. Alçada d'encreuament d'obstacles: ≥280mm 14.Temps de caminada contínua: ≥2h 15. Distància del control remot sense fil: 500 m (obert) 16. Distància de transmissió de vídeo sense fil: 500 m (obert) comunicació de dos punts;Comunicació de tres punts de 800 m (oberta) per conèixer l'escena d'oclusió (opcional); 17.Distància del control remot per cable: 100m 18. Distància de transmissió de vídeo per cable: 100 m 19.Robot crawler: el robot crawler estarà fet de cautxú ignífug, antiestàtic i resistent a altes temperatures, amb Kevlar a l'interior, amb disseny de protecció contra el descarrilament.
3.2 Percepció de vídeo del robot: 1.Nombre i configuració de càmeres: les dues càmeres d'alta definició del cos es poden veure i controlar al mateix temps, i l'entorn de l'escena es pot presentar de manera estable al comandament a distància, que pot satisfer la conducció sense fil del robot i millora considerablement l'eficiència del combat. 3.3 Paràmetres de configuració del terminal de control remot 1. Dimensions: 362 * 188 * 40 (excloent l'alçada del balancí) 2. Pes de la màquina sencera: 2,5 kg 3. Pantalla: pantalla LCD d'alta brillantor de no menys de 10 polzades, 4 canals de commutació de senyal de vídeo 4. Plataforma del sistema de control: sistema operatiu window10 5. Temps de treball: 2h (continu) 6. Funcions bàsiques: el comandament a distància i el monitor estan integrats i portàtils, que es poden veure i controlar al mateix temps, i l'entorn de l'escena es pot presentar de manera estable a l'operador remot. (Funció opcional) Visualització en temps real de la potència de la bateria del cos del vehicle i de la caixa de control remot, la distància a peu i altra informació, i pot controlar els moviments cap endavant, enrere i de direcció del robot.El mètode de transmissió de dades és la transmissió sense fil mitjançant senyal xifrat 7.Funció d'enregistrament i reproducció de vídeo: el vídeo es pot gravar en qualsevol moment i el contingut del vídeo gravat es pot desar automàticament i el vídeo es pot reproduir directament al terminal de control remot o el vídeo es pot copiar a altres dispositius 8. Funció de control de marxa: Sí, 1 joystick s'adona del funcionament flexible del robot cap endavant, cap enrere, gir a l'esquerra i gir a la dreta 9. Interruptor de vídeo: Sí, interruptor de restabliment automàtic 10. Funció de control d'il·luminació: Sí, interruptor de palanca
4.4 Altres: Bobina de comunicació per cable de 100 m Longitud: 100 mm |
| 4.Configuració del producte |
| 1. Robot petit de reconeixement d'incendis RXR-C10D (B) 1 set2.Caixa de control remot (inclosa la bateria) 1 joc 3. Carregador de comandament a distància (12,6 V) 1 unitat 4. Carregador del cos del robot (25,2V) 1 1 unitats 5. Antena de transmissió d'imatges 1,4GHZ 4 unitats 6. Comunicació per cable 100 metres bobina 1 pcs 7. Eines auxiliars 1 joc |